Hello亲爱的小伙伴,这里是英莱科技测试频道
今天我们工件主角就是它:
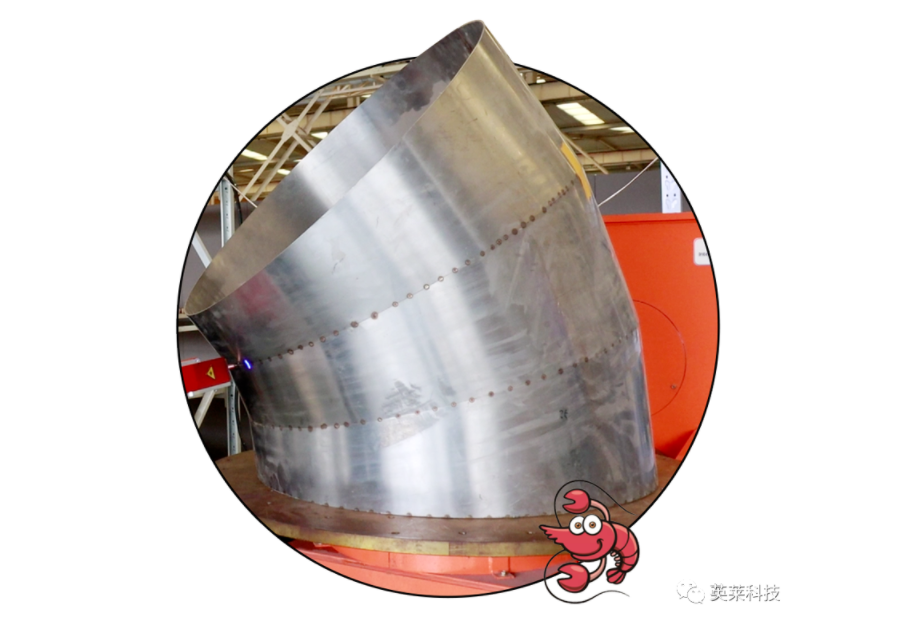
【虾米腰弯头】
这种工件一般由多块材料拼焊而成,一般用于低压、大口径管道,在化工、能源领域应用广泛。由于工件个体较大,在焊接前,受来料、组对、摆放精度影响,焊缝一致性较差,因此多采用焊缝跟踪系统引导机器人进行焊接。

但是....
受以下几点因素影响,传统的跟踪方案已经不能满足要求:
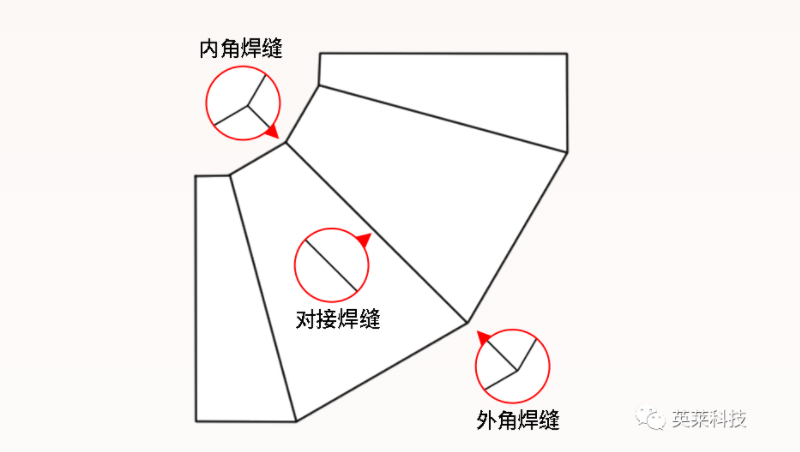
⚪ 焊缝特征变化
传感器跟踪过程中多种焊缝类型相互转换。
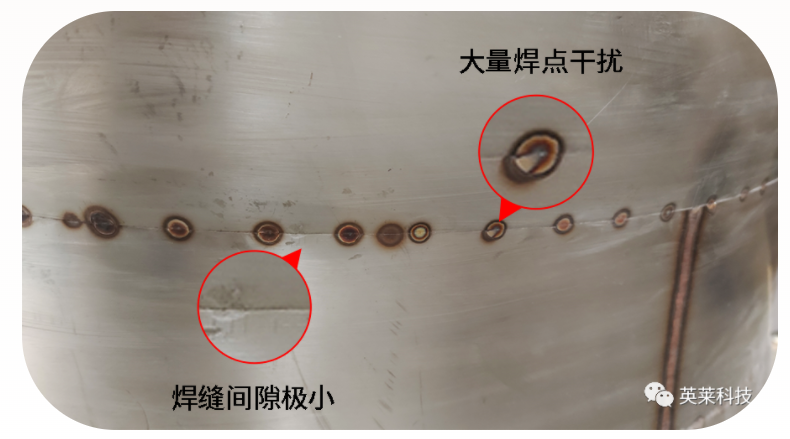
⚪ 焊缝特征点采集困难
·工件反光强;
·部分位置对死,传感器识别特征点困难;
·密集的焊点,干扰焊缝信息采集。
多种技术难点汇集一个工件
综上,这个项目
对算法提出了新要求
1.图像采集算法,需适应焊缝特征的变化
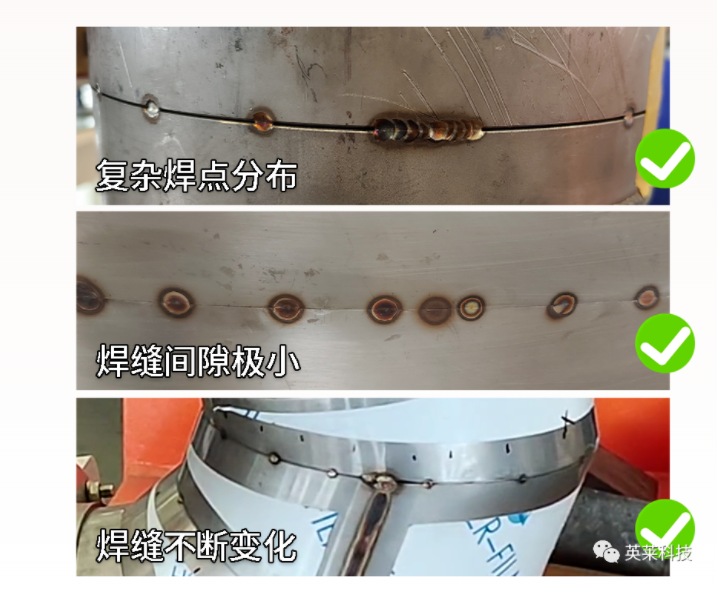
2.在焊点干扰及焊缝间隙极小的情况下,准确采集特征点
![]()
直面挑战,源于我们对产品的信心
功夫不负有心人
新算法闪亮登场
↓↓↓↓↓↓
*视频2.5倍速编辑,在复杂工况下,通过英莱自适应图像采集算法,精准实现焊缝跟踪。
测试总结
⚪ 算法特点:
1.此算法丰富了英莱产品在微对接、多焊点焊缝识别领域的技术维度,同时为此类工件的智能化焊接提供了新方案;
2.该方案也可应用于压力容器,管道等领域的智能化焊接。
⚪ 应用方向:
适用于焊缝不断变化的微小焊缝的跟踪。
好啦,今天的分享到此结束
小编在此感谢您对英莱科技的支持与关注
用心做产品·用心做服务
我们下期见
----------------
作者:英莱科技 2022/03/18
文章版权归作者所有,转载请注明文章出处!*视频2.5倍速编辑,在复杂工况下,通过英莱自适应图像采集算法,精准实现焊缝跟踪。
以客户为中心 以技术为核心
Hello亲爱的小伙伴,这里是英莱科技测试频道
今天我们工件主角就是它:
【虾米腰弯头】
这种工件一般由多块材料拼焊而成,一般用于低压、大口径管道,在化工、能源领域应用广泛。由于工件个体较大,在焊接前,受来料、组对、摆放精度影响,焊缝一致性较差,因此多采用焊缝跟踪系统引导机器人进行焊接。
但是....
受以下几点因素影响,传统的跟踪方案已经不能满足要求:
⚪ 焊缝特征变化
传感器跟踪过程中多种焊缝类型相互转换。
⚪ 焊缝特征点采集困难
·工件反光强;
·部分位置对死,传感器识别特征点困难;
·密集的焊点,干扰焊缝信息采集。
多种技术难点汇集一个工件
综上,这个项目
对算法提出了新要求
1.图像采集算法,需适应焊缝特征的变化
2.在焊点干扰及焊缝间隙极小的情况下,准确采集特征点
![]()
直面挑战,源于我们对产品的信心
功夫不负有心人
新算法闪亮登场
↓↓↓↓↓↓
*视频2.5倍速编辑,在复杂工况下,通过英莱自适应图像采集算法,精准实现焊缝跟踪。
测试总结
⚪ 算法特点:
1.此算法丰富了英莱产品在微对接、多焊点焊缝识别领域的技术维度,同时为此类工件的智能化焊接提供了新方案;
2.该方案也可应用于压力容器,管道等领域的智能化焊接。
⚪ 应用方向:
适用于焊缝不断变化的微小焊缝的跟踪。
好啦,今天的分享到此结束
小编在此感谢您对英莱科技的支持与关注
用心做产品·用心做服务
我们下期见
----------------
作者:英莱科技 2022/03/18
文章版权归作者所有,转载请注明文章出处!*视频2.5倍速编辑,在复杂工况下,通过英莱自适应图像采集算法,精准实现焊缝跟踪。





