激光焊缝跟踪的技术原理和系统组成
激光视觉传感器通过激光条纹对焊缝进行扫描,获得焊缝截面积、焊缝间隙、焊缝左右边缘高度。 它配备了适配的机器人接口,将数据传输给机器人。机器人可根据激光跟踪视觉传感器扫描的焊缝截面参数实时调整焊接摆动、摆动频率、摆动左右停留时间、焊接速度、焊接电流和电压,从而达到 实现高速、高质量的自适应焊接。
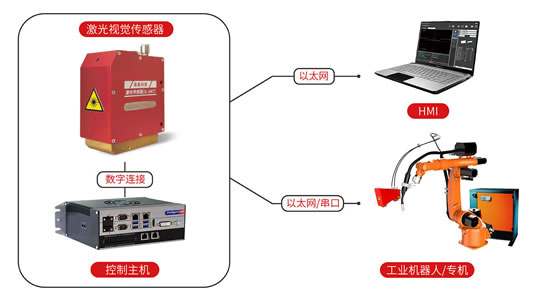
激光跟踪机器人自适应焊接系统主要由机器人、操作装置、检测头、检测头处理器、计算机5部分组成。
激光焊缝跟踪传感器采用激光三角反射原理,即激光束被放大形成一条激光线,投射到被测物体表面。 反射光通过高质量的光学系统,投射到成像矩阵上。 被测表面的距离(Z 轴)和沿激光线(X 轴)的位置信息。 通过移动被测物体或轮廓仪的探头,可以获得一组三维测量值。 获取的信息可用于焊缝搜索定位、焊缝跟踪、自适应焊接参数控制、焊缝成形检测以及将信息实时传输至机械手单元,完成各种复杂焊接,避免焊接质量偏差,实现 智能焊接。