
焊接机器人最终加工对象就是工件与焊嘴之间的坐标的设定及使用。焊接机器人的编程,实际应用中是一个熟练生巧的过程,并不能生搬硬套,需要完全了解其工作任务。今天小编与大家一起学习一下焊接机器人编程的技巧。
1. 工件坐标的设定及使用
机器人使用若干坐标系,每一坐标系都适用于特定类型的微动控制或编程。

● 基坐标系位于机器人基座。它是最便于机器人从一个位置移动到另一个位置标系。
● 工件坐标系与工件相关,通常是最适于对机器人进行编程的坐标系。
● 工具坐标系定义机器人到达预设目标时所使用工具的位置。
● 大地坐标系可定义机器人单元,所有其他的坐标系均与大地坐标系直接或间接相关。
● 用户坐标系在表示持有其他坐标系的设备(如工件)时非常有用。
2. 焊接机器人工作站中的工件
工件是拥有特定附加属性的坐标系,它主要用于简化编程(因置换特定任务和工件进程等而需要编辑程序时)。创建工件可用于简化对工件表面的微动控制。可以创建若干不同的工件,这样就必须选择一个用于微动控制的工件。
使用夹具时,有效载荷是一个重要因素。为了尽可能精确地定位和操纵工件,必须考虑工件重量。必须选择一个用于微动控制,如下图所示。

3. 工件坐标系的定义
工件坐标系:它定义工件相对于大地坐标系(或其他坐标系)的位置,如下图所示。
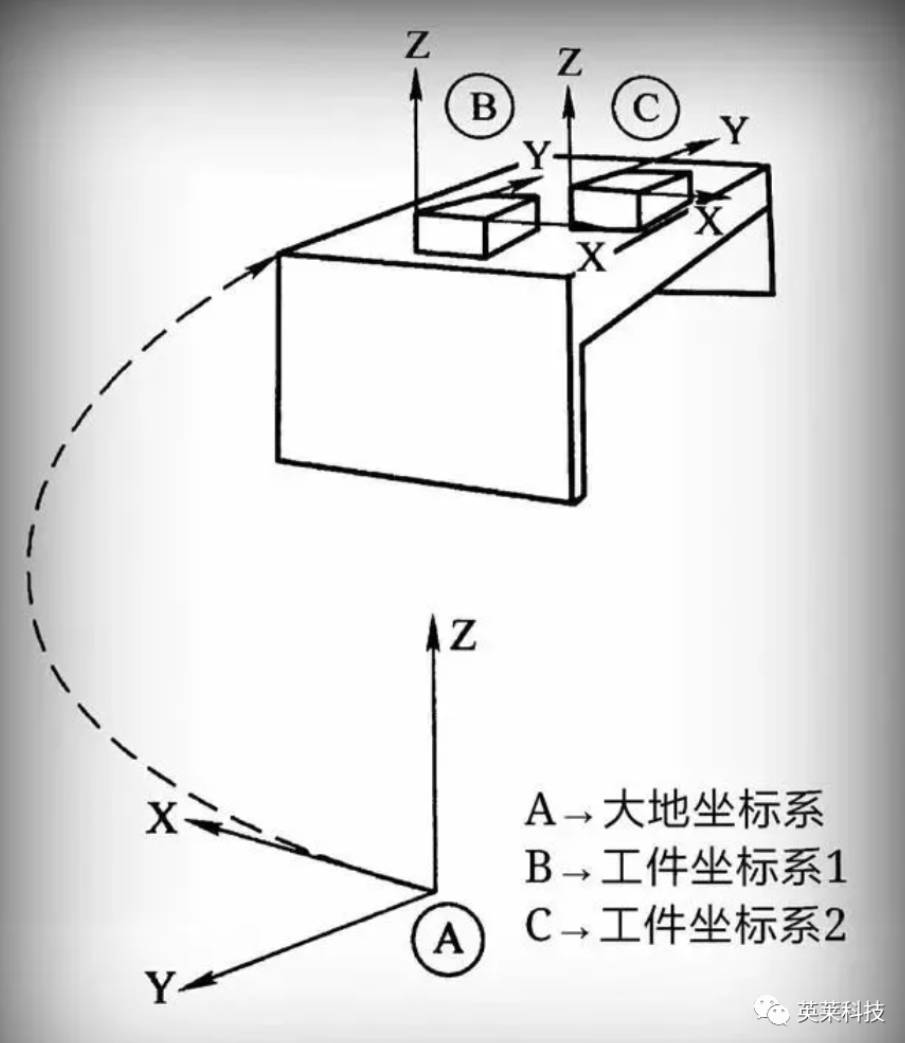
机器人可以拥有若干工件坐标系,表示不同工件,或者表示同一工件在不同位置的若干副本。

对机器人进行编程就是在工件坐标系中创建目标和路径,会有很多优点:
● 重新定位工作站中的工件时,只需更改工件坐标系的位置,所有路径将即刻随之更新。
● 允许操作外轴旋转或直线导轨移动工件,使整个工件与机器人协调运动并始终处于最佳焊接位置。
4. 焊接机器人编程技巧
简单总结以下几点焊接机器人的编程技巧:

1)看工件尺寸与摆放位置合理选择焊接顺序,以焊枪运行的路径长度和以减小焊接变形的顺序。
2)要求焊枪空间移动轨迹平滑、安全。
3)根据工件的材质厚度及工艺要求,优化焊接参数。
4)采用合理的变位机位置、焊枪姿态、焊枪相对接头的位置。
5)编写一定长度的焊接程序后,应及时插入清枪程序,可以防止焊接飞溅堵塞焊接喷嘴和导电嘴,保证焊枪的清洁,提高喷嘴的寿命,确保可靠引弧、减少焊接飞溅。
6)编制程序一般不能一步到位,要在机器人焊接过程中不断检验和修改程序,调整焊接参数及焊枪姿态等。
—— END ——
以客户为中心 以技术为核心
焊接机器人最终加工对象就是工件与焊嘴之间的坐标的设定及使用。焊接机器人的编程,实际应用中是一个熟练生巧的过程,并不能生搬硬套,需要完全了解其工作任务。今天小编与大家一起学习一下焊接机器人编程的技巧。
1. 工件坐标的设定及使用
机器人使用若干坐标系,每一坐标系都适用于特定类型的微动控制或编程。
● 基坐标系位于机器人基座。它是最便于机器人从一个位置移动到另一个位置标系。
● 工件坐标系与工件相关,通常是最适于对机器人进行编程的坐标系。
● 工具坐标系定义机器人到达预设目标时所使用工具的位置。
● 大地坐标系可定义机器人单元,所有其他的坐标系均与大地坐标系直接或间接相关。
● 用户坐标系在表示持有其他坐标系的设备(如工件)时非常有用。
2. 焊接机器人工作站中的工件
工件是拥有特定附加属性的坐标系,它主要用于简化编程(因置换特定任务和工件进程等而需要编辑程序时)。创建工件可用于简化对工件表面的微动控制。可以创建若干不同的工件,这样就必须选择一个用于微动控制的工件。
使用夹具时,有效载荷是一个重要因素。为了尽可能精确地定位和操纵工件,必须考虑工件重量。必须选择一个用于微动控制,如下图所示。
3. 工件坐标系的定义
工件坐标系:它定义工件相对于大地坐标系(或其他坐标系)的位置,如下图所示。
机器人可以拥有若干工件坐标系,表示不同工件,或者表示同一工件在不同位置的若干副本。
对机器人进行编程就是在工件坐标系中创建目标和路径,会有很多优点:
● 重新定位工作站中的工件时,只需更改工件坐标系的位置,所有路径将即刻随之更新。
● 允许操作外轴旋转或直线导轨移动工件,使整个工件与机器人协调运动并始终处于最佳焊接位置。
4. 焊接机器人编程技巧
简单总结以下几点焊接机器人的编程技巧:
1)看工件尺寸与摆放位置合理选择焊接顺序,以焊枪运行的路径长度和以减小焊接变形的顺序。
2)要求焊枪空间移动轨迹平滑、安全。
3)根据工件的材质厚度及工艺要求,优化焊接参数。
4)采用合理的变位机位置、焊枪姿态、焊枪相对接头的位置。
5)编写一定长度的焊接程序后,应及时插入清枪程序,可以防止焊接飞溅堵塞焊接喷嘴和导电嘴,保证焊枪的清洁,提高喷嘴的寿命,确保可靠引弧、减少焊接飞溅。
6)编制程序一般不能一步到位,要在机器人焊接过程中不断检验和修改程序,调整焊接参数及焊枪姿态等。
—— END ——





