
工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有较高的自动性,可依靠自身的功能优势,工业机器人被广泛应用于焊接、电子、物流、化工等各个工业领域之中。那么机器人对自身的工作环境有要求么,此时正值北方的冬季,如果工业机器人受低温影响,出现无法启动等故障,高如处理呢?
今天,英莱小编和您聊一聊工业机器人低温环境下常见故障及处理办法。
冬季初期环境温度较低时,部分工业机器人在焊接、搬运和辊边等过程中,出现与外界设备发生碰撞、偏离机器人运行轨迹、关节负荷过高或某轴过电流等问题,在机器人手动运行回到原位后,进行减少机器人自动运行速度操作后恢复生产,机器人故障现象消失。
//1. ABB机器人
在焊装车间冬季初期,尤其在上午生产线体启动期间,ABB机器人出现“关节负荷过高”及“动作监控”报警较为频繁,机器人关节ROB_X(如图1所示,X代表机器人关节轴,ROB1_2为机器人1的第二关节轴)实际转矩过高,可能为负荷数据错误、加速度过高、外部过程力度过大、低温或硬件故障。
经技术人员进行现场状态确认,机器人未与设备和工件等物体发生碰撞,排除由于卡滞和碰撞造成的转矩或负荷过高。机器人动作监控被触发,机器人机械单元的移动被立即中断。
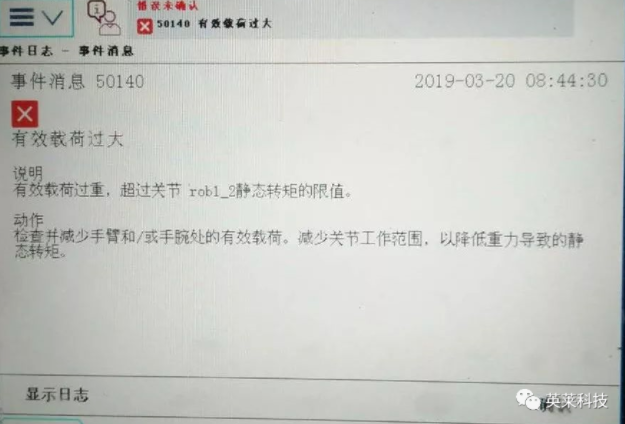
(图1 ABB机器人报警界面)
//2. KUKA机器人
同样在车间入冬初期,车间空调未开启,车间环境温度低于10℃以下,尤其在上午线体开启期间,KUKA机器人频繁报“超过最大滞后误差(X)”X为机器人或附属机械关节轴。
下面将结合ABB和KUKA机器人告诉大家对上述问题应该怎么解决!
//1. 检查硬件
如果该问题在现场持续发生,即发生的频率很高,则需要检查硬件,包括电动机、电缆和伺服驱动等相关的硬件,
可以采用替换法换掉相应的模块。需要注意的是只需要更换报警轴的相应部分。
(注:KUKA机器人的KPP/KSP不能同时更换,否则会报错,必须逐一更换。)
//2. 温度原因
在温度较低的环境中工作会造成机器人内部的油脂黏稠度较高,机器人运行时会由于油脂黏稠度高而造成设备运行阻力大,导致齿轮箱内的摩擦,电路板主要为半导体材料,半导体在低温环境下运行不稳定,可能会出现机器人控制系统死机或开启机器人时间长等问题。
● ABB工业机器人温度特性 本体储存温度为-25~55℃,在存储时间低于24h的情况下能够承受的最高温度为70℃,机器人本体在常温下能够承受的最大湿度为95%。机器人本体操作温度范围为5~50℃,机器人IRC5在常温下能够承受的最大湿度为95%。
● KUKA工业机器人温度特性 本体存储温度为-40~60℃,机器人本体运行温度为10~55℃。机器人KRC4储存温度为5~45℃。
//3. 解决方法
①提高工业机器人本体和工作环境得温度,如开启车间空调(考虑南方部分车间没有采暖设施,提供工作环境温度不容易实现)。
②针对机器人齿轮油脂想到的解决方法是,在低温环境下向油脂中添加防冻剂。但是机器人油脂一般是被机器人厂家垄断,组成成分是保密的,所以要在咨询厂家的情况下在添加防冻添加剂,不然可能会损坏机器人的齿轮箱。
③除此之外,工业机器人还可以在开始生产运行时低速运行一段时间,采用速度逐渐提高的渐进式方法恢复到机器人外部全速或客户要求的节拍,
KUKA机器人的电动机电流可以通过预热的功能监控,一旦达到了设定值,控制系统会自动降低运动速度,由此来降低电动机电流。
好啦今天我们就分享到这里,希望对您有所帮助,想了解更多机器人知识,记得转发关注哦~
以客户为中心 以技术为核心
工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有较高的自动性,可依靠自身的功能优势,工业机器人被广泛应用于焊接、电子、物流、化工等各个工业领域之中。那么机器人对自身的工作环境有要求么,此时正值北方的冬季,如果工业机器人受低温影响,出现无法启动等故障,高如处理呢?
今天,英莱小编和您聊一聊工业机器人低温环境下常见故障及处理办法。
冬季初期环境温度较低时,部分工业机器人在焊接、搬运和辊边等过程中,出现与外界设备发生碰撞、偏离机器人运行轨迹、关节负荷过高或某轴过电流等问题,在机器人手动运行回到原位后,进行减少机器人自动运行速度操作后恢复生产,机器人故障现象消失。
//1. ABB机器人
在焊装车间冬季初期,尤其在上午生产线体启动期间,ABB机器人出现“关节负荷过高”及“动作监控”报警较为频繁,机器人关节ROB_X(如图1所示,X代表机器人关节轴,ROB1_2为机器人1的第二关节轴)实际转矩过高,可能为负荷数据错误、加速度过高、外部过程力度过大、低温或硬件故障。
经技术人员进行现场状态确认,机器人未与设备和工件等物体发生碰撞,排除由于卡滞和碰撞造成的转矩或负荷过高。机器人动作监控被触发,机器人机械单元的移动被立即中断。
(图1 ABB机器人报警界面)
//2. KUKA机器人
同样在车间入冬初期,车间空调未开启,车间环境温度低于10℃以下,尤其在上午线体开启期间,KUKA机器人频繁报“超过最大滞后误差(X)”X为机器人或附属机械关节轴。
下面将结合ABB和KUKA机器人告诉大家对上述问题应该怎么解决!
//1. 检查硬件
如果该问题在现场持续发生,即发生的频率很高,则需要检查硬件,包括电动机、电缆和伺服驱动等相关的硬件,
可以采用替换法换掉相应的模块。需要注意的是只需要更换报警轴的相应部分。
(注:KUKA机器人的KPP/KSP不能同时更换,否则会报错,必须逐一更换。)
//2. 温度原因
在温度较低的环境中工作会造成机器人内部的油脂黏稠度较高,机器人运行时会由于油脂黏稠度高而造成设备运行阻力大,导致齿轮箱内的摩擦,电路板主要为半导体材料,半导体在低温环境下运行不稳定,可能会出现机器人控制系统死机或开启机器人时间长等问题。
● ABB工业机器人温度特性 本体储存温度为-25~55℃,在存储时间低于24h的情况下能够承受的最高温度为70℃,机器人本体在常温下能够承受的最大湿度为95%。机器人本体操作温度范围为5~50℃,机器人IRC5在常温下能够承受的最大湿度为95%。
● KUKA工业机器人温度特性 本体存储温度为-40~60℃,机器人本体运行温度为10~55℃。机器人KRC4储存温度为5~45℃。
//3. 解决方法
①提高工业机器人本体和工作环境得温度,如开启车间空调(考虑南方部分车间没有采暖设施,提供工作环境温度不容易实现)。
②针对机器人齿轮油脂想到的解决方法是,在低温环境下向油脂中添加防冻剂。但是机器人油脂一般是被机器人厂家垄断,组成成分是保密的,所以要在咨询厂家的情况下在添加防冻添加剂,不然可能会损坏机器人的齿轮箱。
③除此之外,工业机器人还可以在开始生产运行时低速运行一段时间,采用速度逐渐提高的渐进式方法恢复到机器人外部全速或客户要求的节拍,
KUKA机器人的电动机电流可以通过预热的功能监控,一旦达到了设定值,控制系统会自动降低运动速度,由此来降低电动机电流。
好啦今天我们就分享到这里,希望对您有所帮助,想了解更多机器人知识,记得转发关注哦~





