工业生产中的机器人,一般需要配备除了自身性能特点的外围设备,如翻转变位机、回转工作平台、水平移动平台等。这些外围设备的运动和位置控制都需要与工业机器人相配合并要求相应精度。通常机器人运动轴按其功能可划分为机器人轴、基座轴和工装轴,基座轴和工装轴统称外部轴。
● 机器人轴:是指机器人本体的轴,目前商用的工业机器人大多以6轴为主。
● 基座轴:是使机器人移动轴的总称,主要指行走轴( 移动滑台或导轨)。
● 工装轴:是除机器人轴、基座轴以外轴的总称,指使工件、工装夹具翻转和回转的轴,如回转台、翻转台等。
实际生产中常用的是6关节工业机器人,该操作机有6个可活动的关节(轴)。下图为常见工业机器人本体运动轴的定义,值得注意的是,不同的工业机器人本体运动轴的定义也不同。用于保证末端执行器达到工作空间任意位置的轴称为基本轴或主轴;用于实现末端执行器任意空间姿态的轴,称为腕部轴或次轴。

【如何理解工业机器人坐标系?】
机器人程序中所有点的位置都和坐标系关联,同时这个坐标系也可能和另一个坐标系关联。
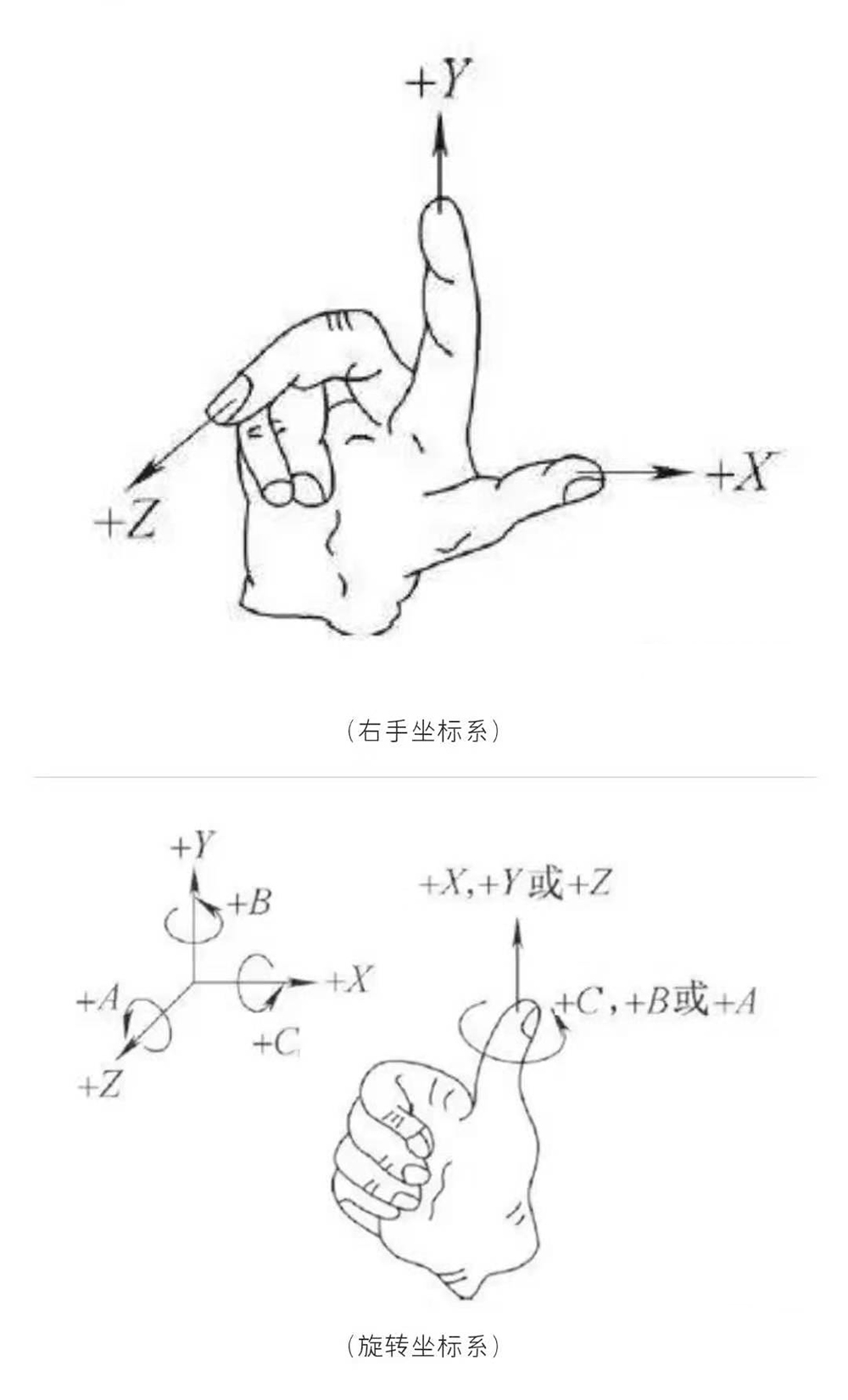
机器人的各种坐标系都由正交的右手定则来决定,如下图所示:
● 当围绕平行于X 、Y 、 Z 轴线的各轴旋转时,分别定义为C 、B 、A 。
● C 、B 、A 的正方向分别是X 、Y 、Z 正方向上右手螺旋前进的方向。
那么常用的坐标系有哪些呢?常用的坐标系包括:绝对坐标系、机座坐标系、机械接口坐标系和工具坐标系。
>>>> 绝对坐标系>>>>>
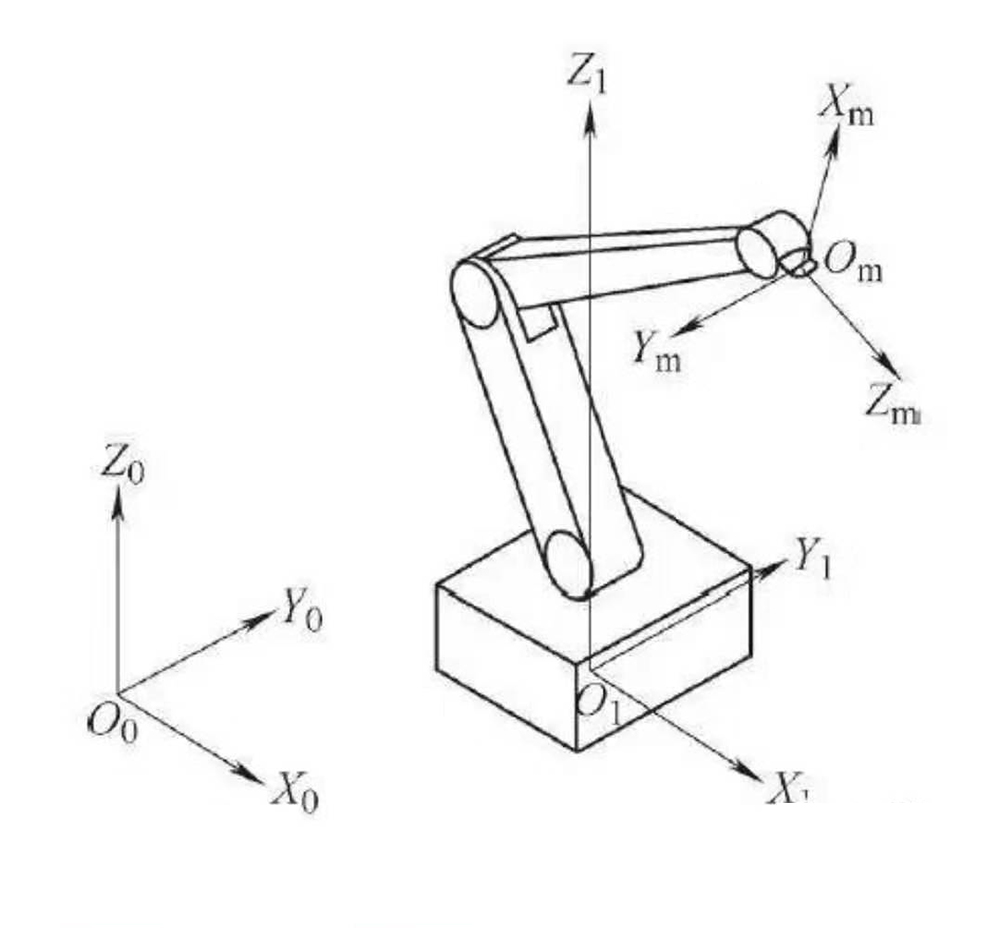
绝对坐标系(也称大地坐标系)与机器人的运动无关,以地球为参照系的固定坐标系(见下图左),符号为O 0、X 0、Y 0、Z 0。原点O 0、+X 0轴由用户根据需要来确定;+Z 0轴与重力加速度的矢量共线,但方向相反。
>>>> 基座坐标系>>>>>
机座坐标系是以机器人机座安装平面为参照系的坐标系,符号为O 1、X 1、Y 1、Z 1(见上图右)。原点O 1由机器人制造厂规定;+Z 1轴垂直于机器人机座安装面,指向机器人机体;X1轴方向由原点指向机器人工作空间中心点。
>>>> 用户坐标系>>>>>
机器人可以和不同的工作台或夹具配合工作, 在每个工作台上建立一个用户坐标系。机器人大部分采用示教编程的方式,步骤繁琐,对于相同工件,若放置在不同工作台进行操作,不必重新编程,只需相应地变换到当前用户坐标系下。用户坐标系在基坐标系或者世界坐标系下建立。
>>>> 机械接口坐标系>>>>>
机械接口坐标系是以机械接口为参照系,符号为O m、X m、Y m、Z m(见上图右)。原点O m是机械接口的中心;+Z m轴的方向垂直于机械接口中心,并由此指向末端执行器;+X m轴由机械接口平面和X 1、Z 1平面的交线来定义,同时机器人的主、副关节轴处于运动范围的中间位置。当机器人构造不能实现此约定时,应由制造厂规定主关节轴位置。+X m轴的指向远离Z 1轴。
>>>> 工具坐标系>>>>>
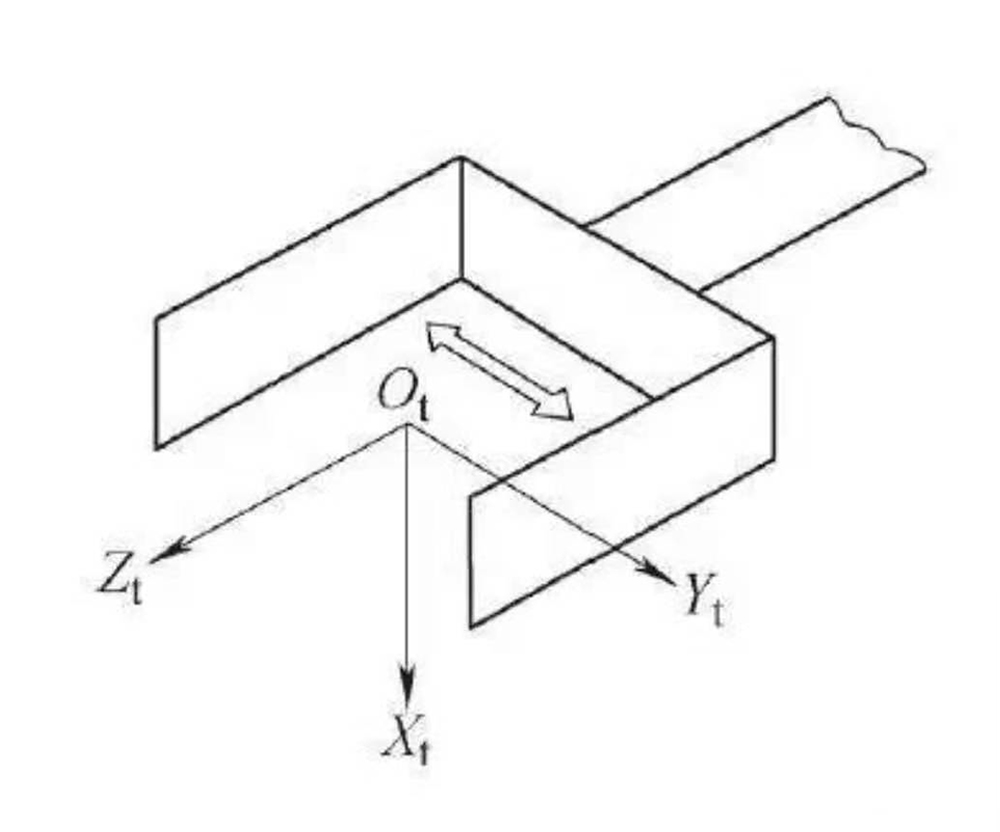
工具坐标系以安装在机械接口上的末端执行器为参照系,符号为O t、X t、Y t、Z t(见下图)。原点O t是工具中心点(TCP);+Zt轴与工具有关,通常是工具指向;在平板式夹爪型夹持器夹持时,+Y t是手指运动平面的方向。
【总结】
由于工业机器人品种众多,每种工业机器人的坐标系也很多,其命名、确定方式虽然有标准,但是有的生产厂家又不按标准执行, 各有各的叫法。在实际生产应用时就显得混乱麻烦。本文主要介绍了工业机器人坐标轴命名与常用坐标系的确定,以期对使用者有所帮助。
●●● END ●●●
激光视觉产品咨询 | Tel: 0315-5915696
区域销售经理
· 薛经理:19931561215
(上海、江苏、安徽、重庆、四川)
· 霍经理:13933326856
(湖南、浙江、福建、广东、广西)
· 黄经理:19931561197
(山东、河南、湖北)
· 戈经理:13383348988
(北京、河北、山西、陕西、安徽)
· 娄经理:18931990050
(天津、黑龙江、辽宁、吉林、内蒙古)
广东佛山分公司
·刘经理:13928003771
机器人激光跟踪系统方案咨询 | Tel: 0315-5919026
行政办公室及人事招聘 | Tel: 0315-5915695
| Fax: 0315-5068955
| Email:support@intelligentlaser.cn
| Website: www.intelligentlaser.cn
| Add: 唐山市高新技术开发区卫国北路1698号唐山科技中心21层
| Add: 广东省佛山市顺德区乐从镇岭南大道南2号中欧F栋4层425室
以客户为中心 以技术为核心
工业生产中的机器人,一般需要配备除了自身性能特点的外围设备,如翻转变位机、回转工作平台、水平移动平台等。这些外围设备的运动和位置控制都需要与工业机器人相配合并要求相应精度。通常机器人运动轴按其功能可划分为机器人轴、基座轴和工装轴,基座轴和工装轴统称外部轴。
● 机器人轴:是指机器人本体的轴,目前商用的工业机器人大多以6轴为主。
● 基座轴:是使机器人移动轴的总称,主要指行走轴( 移动滑台或导轨)。
● 工装轴:是除机器人轴、基座轴以外轴的总称,指使工件、工装夹具翻转和回转的轴,如回转台、翻转台等。
实际生产中常用的是6关节工业机器人,该操作机有6个可活动的关节(轴)。下图为常见工业机器人本体运动轴的定义,值得注意的是,不同的工业机器人本体运动轴的定义也不同。用于保证末端执行器达到工作空间任意位置的轴称为基本轴或主轴;用于实现末端执行器任意空间姿态的轴,称为腕部轴或次轴。
【如何理解工业机器人坐标系?】
机器人程序中所有点的位置都和坐标系关联,同时这个坐标系也可能和另一个坐标系关联。
机器人的各种坐标系都由正交的右手定则来决定,如下图所示:
● 当围绕平行于X 、Y 、 Z 轴线的各轴旋转时,分别定义为C 、B 、A 。
● C 、B 、A 的正方向分别是X 、Y 、Z 正方向上右手螺旋前进的方向。
那么常用的坐标系有哪些呢?常用的坐标系包括:绝对坐标系、机座坐标系、机械接口坐标系和工具坐标系。
>>>> 绝对坐标系>>>>>
绝对坐标系(也称大地坐标系)与机器人的运动无关,以地球为参照系的固定坐标系(见下图左),符号为O 0、X 0、Y 0、Z 0。原点O 0、+X 0轴由用户根据需要来确定;+Z 0轴与重力加速度的矢量共线,但方向相反。
>>>> 基座坐标系>>>>>
机座坐标系是以机器人机座安装平面为参照系的坐标系,符号为O 1、X 1、Y 1、Z 1(见上图右)。原点O 1由机器人制造厂规定;+Z 1轴垂直于机器人机座安装面,指向机器人机体;X1轴方向由原点指向机器人工作空间中心点。
>>>> 用户坐标系>>>>>
机器人可以和不同的工作台或夹具配合工作, 在每个工作台上建立一个用户坐标系。机器人大部分采用示教编程的方式,步骤繁琐,对于相同工件,若放置在不同工作台进行操作,不必重新编程,只需相应地变换到当前用户坐标系下。用户坐标系在基坐标系或者世界坐标系下建立。
>>>> 机械接口坐标系>>>>>
机械接口坐标系是以机械接口为参照系,符号为O m、X m、Y m、Z m(见上图右)。原点O m是机械接口的中心;+Z m轴的方向垂直于机械接口中心,并由此指向末端执行器;+X m轴由机械接口平面和X 1、Z 1平面的交线来定义,同时机器人的主、副关节轴处于运动范围的中间位置。当机器人构造不能实现此约定时,应由制造厂规定主关节轴位置。+X m轴的指向远离Z 1轴。
>>>> 工具坐标系>>>>>
工具坐标系以安装在机械接口上的末端执行器为参照系,符号为O t、X t、Y t、Z t(见下图)。原点O t是工具中心点(TCP);+Zt轴与工具有关,通常是工具指向;在平板式夹爪型夹持器夹持时,+Y t是手指运动平面的方向。
【总结】
由于工业机器人品种众多,每种工业机器人的坐标系也很多,其命名、确定方式虽然有标准,但是有的生产厂家又不按标准执行, 各有各的叫法。在实际生产应用时就显得混乱麻烦。本文主要介绍了工业机器人坐标轴命名与常用坐标系的确定,以期对使用者有所帮助。
●●● END ●●●
激光视觉产品咨询 | Tel: 0315-5915696
区域销售经理
· 薛经理:19931561215
(上海、江苏、安徽、重庆、四川)
· 霍经理:13933326856
(湖南、浙江、福建、广东、广西)
· 黄经理:19931561197
(山东、河南、湖北)
· 戈经理:13383348988
(北京、河北、山西、陕西、安徽)
· 娄经理:18931990050
(天津、黑龙江、辽宁、吉林、内蒙古)
广东佛山分公司
·刘经理:13928003771
机器人激光跟踪系统方案咨询 | Tel: 0315-5919026
行政办公室及人事招聘 | Tel: 0315-5915695
| Fax: 0315-5068955
| Email:support@intelligentlaser.cn
| Website: www.intelligentlaser.cn
| Add: 唐山市高新技术开发区卫国北路1698号唐山科技中心21层
| Add: 广东省佛山市顺德区乐从镇岭南大道南2号中欧F栋4层425室





