题一:什么情况下工业机器人会发生零点丢失现象?
②另外搬运和运输过程中如果发生大幅度的摇晃或者碰撞也容易发生零点丢失的情况。
----------------------------------------------------------------
问题二:零点丢失对工业机器人会有什么影响呢?
答:
①一般机器人都会出现报警,此时无法再自动运行;
②无法编程运行: 不能沿编程设定的点运行;
③无法在手动运行模式下手动平移: 不能在坐标系中移动;
④软件限位开关关闭。
通过以上2个问答我们可以看出零点丢失对工业机器人的影响有多严重!因此我们必须了解什么时候需要对工业机器人进行零点标定,以及零点恢复的方法。
⚪ 什么时候需要对工业机器人进行零点标定?
原则上,机器人必须时刻处于已标定零点的状态。在以下情况下必须进行零点标定:
1、在投入运行时。
2、在对参与定位值感测的部件(例如带分解器或RDC的电机)采取了维护措施之后。
3、当未用控制器移动了机器人轴(例如借助于自由旋转装置)时。
4、进行了机械修理后,问题是必须先删除机器人的零点,然后才可标定零点:
(1)更换齿轮箱后。
(2)以高于250 mm/s 的速度上行移至一个终端止挡之后。
(3)在碰撞后。
( 注意:在进行维护前一般应检查当前的零点标定。)
⚪ 零点恢复的方法
以KUKA为例,使用EMD对机器人进行零点校准。首先移动机器人各轴到达零点位置,如下图所示:

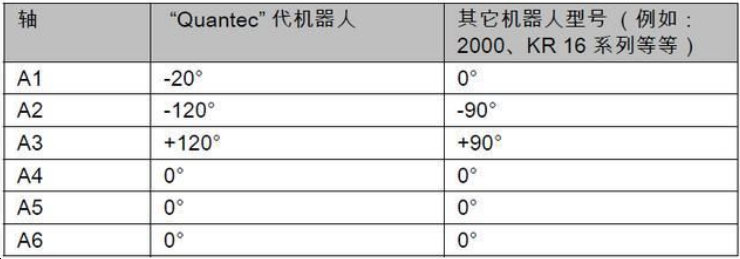
当然不同的机器人零点校准位置也不相同,请参考下表:
EMD介绍:如下图所示为EMD,按照图示将各个部件连接好。

将EMD如下图所示与机器人进行连接,此时应注意不能再手动对机器人进行运动操作,否则可能造成探头损坏。

连接完成后,按下图所示执行零点校准:

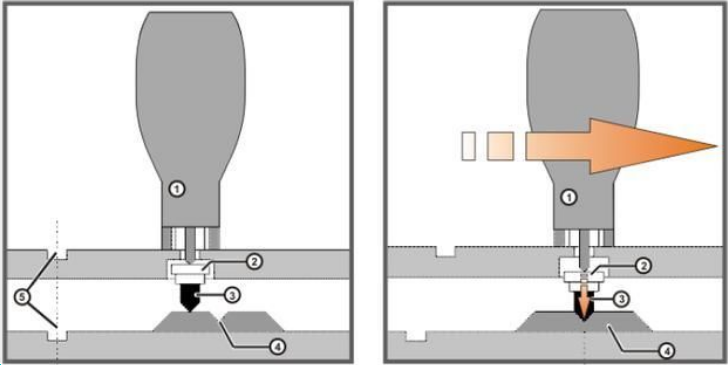
校准示意图如下:选择需要执行零点校准的轴,在开始时使机器人轴回到零点位置,使对应的凹槽处于同一直线上。然后按使能键,伺服上电后,按执行键,机器人会自动进行零点校准,执行校准程序时,机器人缓慢移动,当探头3准确到达零点凹槽4位置时,机器人提示校准完成,此时机器人停止移动,机器人该轴的零点实现校准。
------------------------------------------------

以客户为中心 以技术为核心
题一:什么情况下工业机器人会发生零点丢失现象?
②另外搬运和运输过程中如果发生大幅度的摇晃或者碰撞也容易发生零点丢失的情况。
----------------------------------------------------------------
问题二:零点丢失对工业机器人会有什么影响呢?
答:
①一般机器人都会出现报警,此时无法再自动运行;
②无法编程运行: 不能沿编程设定的点运行;
③无法在手动运行模式下手动平移: 不能在坐标系中移动;
④软件限位开关关闭。
通过以上2个问答我们可以看出零点丢失对工业机器人的影响有多严重!因此我们必须了解什么时候需要对工业机器人进行零点标定,以及零点恢复的方法。
⚪ 什么时候需要对工业机器人进行零点标定?
原则上,机器人必须时刻处于已标定零点的状态。在以下情况下必须进行零点标定:
1、在投入运行时。
2、在对参与定位值感测的部件(例如带分解器或RDC的电机)采取了维护措施之后。
3、当未用控制器移动了机器人轴(例如借助于自由旋转装置)时。
4、进行了机械修理后,问题是必须先删除机器人的零点,然后才可标定零点:
(1)更换齿轮箱后。
(2)以高于250 mm/s 的速度上行移至一个终端止挡之后。
(3)在碰撞后。
( 注意:在进行维护前一般应检查当前的零点标定。)
⚪ 零点恢复的方法
以KUKA为例,使用EMD对机器人进行零点校准。首先移动机器人各轴到达零点位置,如下图所示:
当然不同的机器人零点校准位置也不相同,请参考下表:
EMD介绍:如下图所示为EMD,按照图示将各个部件连接好。
将EMD如下图所示与机器人进行连接,此时应注意不能再手动对机器人进行运动操作,否则可能造成探头损坏。
连接完成后,按下图所示执行零点校准:
校准示意图如下:选择需要执行零点校准的轴,在开始时使机器人轴回到零点位置,使对应的凹槽处于同一直线上。然后按使能键,伺服上电后,按执行键,机器人会自动进行零点校准,执行校准程序时,机器人缓慢移动,当探头3准确到达零点凹槽4位置时,机器人提示校准完成,此时机器人停止移动,机器人该轴的零点实现校准。
------------------------------------------------





